K2 Test – Jan 17
Return to News













Today was a beautiful day to test our wind sensor, Paul Larkin’s headsets, and our new GoPro Hero3 cameras. We also performed a brief kite test using the new 18 sqm kite. Paul’s friend John Bond joined us on this test.
First, we compared our primary wind sensor, an ultrasonic model, to a standard cup-and-vane sensor. In the past, we have seen suspicious readings in true wind speed and direction that we attributed to compass miscalibration or poor alignment of the sensor with the boat. In the last test, however, we collected data that showed that any compass or alignment errors that exist are far smaller than the discrepancies that we have seen. This data indicates that the basic apparent wind speed and/or direction measurements of the ultrasonic sensor may be erroneous.
To test the sensor, we added a traditional cup-and-vane sensor beside our ultrasonic sensor (both mounted on the stern pole) and compared their apparent wind measurements. Interestingly, there was a significant and systematic difference between the two of +/- 10 degrees. The wind today was light, which may favor the cup and vane sensor, so we plan to repeat the experiment on a windier day before drawing any definitive conclusion.
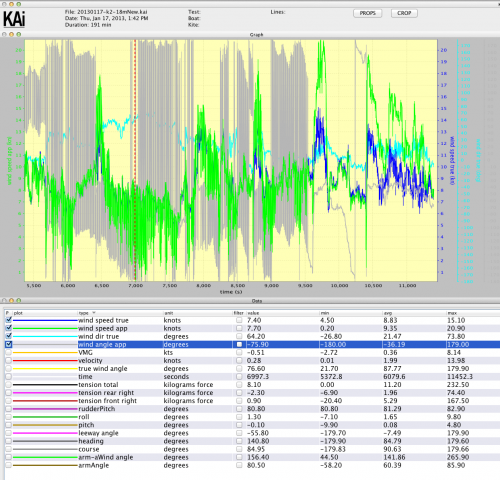
The first attached plot is a time series of AWA and AWS measurements from each sensor. Note that the difference in AWA between the two sensors changes sign at about 180 degrees, and that the cup-and-vane sensor usually reports lighter winds.
The polar plot shows the difference between the ultrasonic and mechanical sensors versus apparent wind angle. At an AWA of 0 and 180 degrees, the two sensors agree fairly well (the blue line is close to the green circle, indicating zero difference in output), but in crosswind, the error reaches +/-10 degrees, indicated by proximity to the red and magenta circles. This result indicates a sensor error, but does not suggest which sensor is more accurate. The mechanical vane sensor seems less likely to exhibit this sort of error, but we will devise additional tests to verify and will continue to log data from both devices.
For our second test, we used Paul Larkin’s headsets as we did on the 15th, in addition to throat mics and ear mics. Paul mounted one antenna on the kiteboat and used another, portable antenna on the Protector. Eventually, we would want to install a dedicated antennae on our chase boat in addition to the one on the boat.
We did some camera testing as well, using the wireless remotes to control 5 Hero3 GoPros, which we mounted in the usual places on the stern, chair, and mast, and kite, and we put a second camera on the kite. We used two remotes, one for one kite camera, and one for the other four cameras. The cameras seem more likely to work if there are fewer of them attached to each remote. At the dock, we turned all of the cameras on and off and on again, but after we turned it off, the mast camera would not turn back on with the other cameras. During the kite test, the kite camera on its own remote worked despite the remote being on the Protector, but we could not reach the other camera once the kite was deployed. Next time we will see if we can control multiple cameras reliably if the remotes stay on the kiteboat. See January 18 post for more GoPro tests.
Finally, we successfully launched and flew the new 18 sqm kite for the first time. We found some wind near Golden Gate Bridge and were able to fly for a few minutes before the wind died again. The kite was harder to launch than our standard kites, but the maneuvering while flying was good. Some of the launch difficulty could have been due to the way that we rigged the kite, and certainly some of it was due to lack of wind. We will repeat when the wind picks up again.
Kai View Data:
20130117-k2-18mNew.kai
January 17, 2013 2:00 pm
January 17, 2013 5:40 pm
SF Bay, off Crissy Field
K2 + Protector
approx 10-12 knots
55 deg F
Don and John Bond, then also Greg
Jamie, Nyx, Greg, and Paul Larkin on Protector
5 GoPros H3 (kite1, kite2, chair, mast, sternpole) + 7D on Protector
KB-KW-18A
50m
14 knots
Return to News
More: Electronics and Software Development,