Another successful low wind test today. We took the 50 sqm kite again, but this time we extended the lines from 60 m to 80 m to catch a bit more wind. Prior to launching the kite, we towed the boat in large slow circles again to calibrate the wind sensor compass, this time successfully. We then towed to Treasure Island and practiced down wind runs again, toward Berkeley. We dropped the kite in low wind near Emeryville and towed back to TI to launch again. When we re-inflated the kite, we ran out of compressed air, but still managed to launch and begin sailing with only 1 psi (instead of 4.5). By the time we ended the test 40 minutes […more]
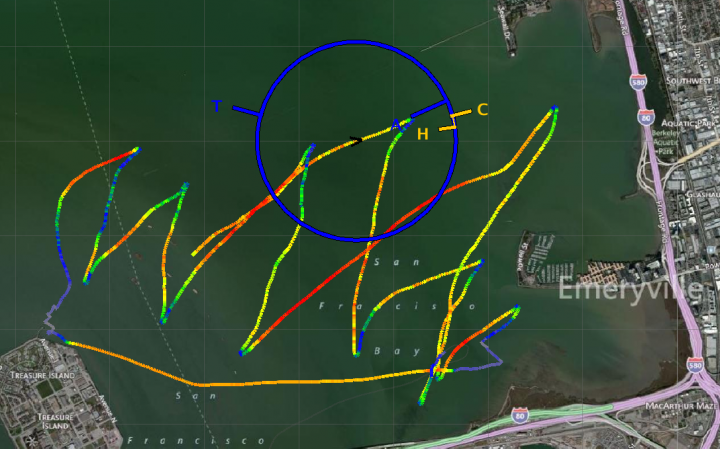
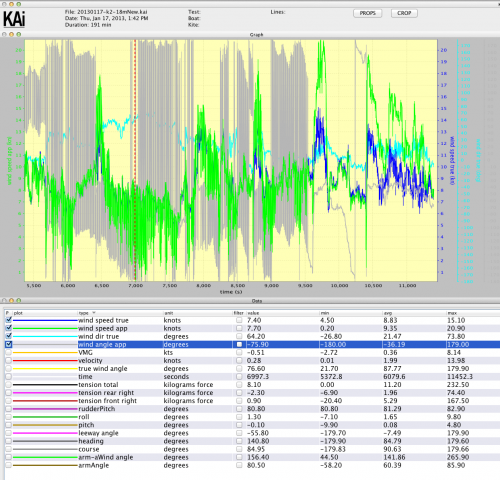
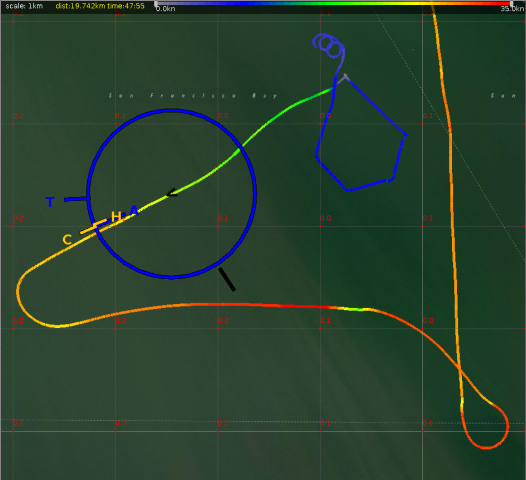
Today we headed out to Treasure Island for a test. We initially had trouble launching the 50 sqm kite because the wind was so low, but then we hit 33 knots on our first run, in only about 12 knots of wind. As noted in previous posts, we are improving our measure of true wind angle in order to better understand how to maximize our speed downwind. For this test, we practiced sailing at (and measuring) different wind angles between TI and Berkeley Marina (see attached screenshot). Martin Bretschneider joined us again, and he took a turn at the kite helm.
Hooked up 7 GoPros (4 Hero2s with WiFi bacpacs, 3 Hero3s) to one remote. It was very difficult to synch more than that to one remote. I also hooked up a separate GoPro to the phone app. I placed them around the boat. Upon turning on the first remote, it bounced between 6 and 7 cameras ready. When it bounced back to 7, I started recording for all 7. Checked to see all were recording, hit stop and repeated this process three times standing on the tramps, the hull near the nose, and the hull near the rudder. Each time I also entirely powered them on and off via […more]
Today was a beautiful day to test our wind sensor, Paul Larkin’s headsets, and our new GoPro Hero3 cameras. We also performed a brief kite test using the new 18 sqm kite. Paul’s friend John Bond joined us on this test.
First, we compared our primary wind sensor, an ultrasonic model, to a standard cup-and-vane sensor. In the past, we have seen suspicious readings in true wind speed and direction that we attributed to compass miscalibration or poor alignment of the sensor with the boat. In the last test, however, we collected data that showed that any compass or alignment errors that exist are far smaller than the discrepancies that we have seen. This data indicates that the basic apparent […more]
Today we performed a series of tests as part of our effort to improve our measurement of the kiteboat’s performance versus true wind angle (TWA), which is the angle between the wind direction and the heading of the boat. This information is ultimately used to produce polar plots, which are a standard method of showing the expected speed of a boat at different TWA. We are approaching this goal from several directions, which include adding a real-time update of the boat TWA to the boat mobile device displays and updating the KAIView software, as well as checking that the wind sensor readings are accurate. Today we towed K2 to calibrate the compass for this purpose. We additionally towed the boat […more]
Today we took K2 out for the first test of the year. We had hoped to test a new 18 sqm kite, but the wind was low, and we were not able to complete launching. This kite has a drastically different planform from our other kites. The trailing edge is shorter than the leading edge, which gives it more of a conical shape and means that the kite will always be more powered up. This kite also has much skinnier struts that more rapidly taper than those on our other kites. The kite struts are reinforced so they can be inflated to 10 psi (instead of 4-5 psi); we hope that this increased rigidity will offset the narrower diameter. This […more]