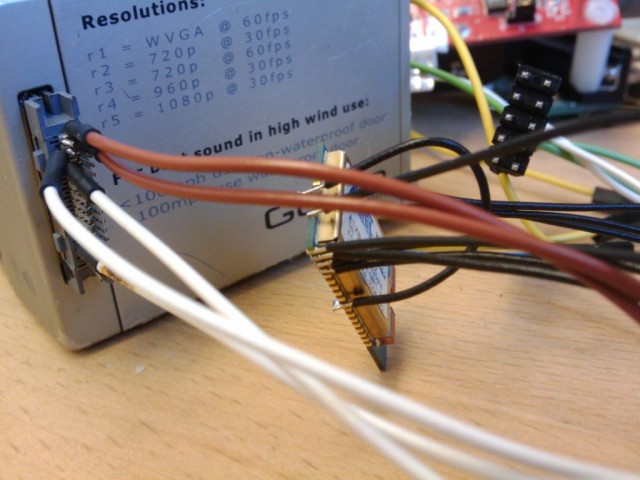
From Jamie: We have made a circuit board that gives us wireless, networked control over GoPro Hero cameras and requires no camera modification. To minimize overall complexity, we took the approach of connecting to the cameras entirely via the exposed bus connector. We will be able to start and stop all cameras at the same time, and keep a record of those times in our logfiles. This makes it possible to record video and images that are synchronized to the other test data and will conserve camera battery life. The wireless range using smaller, lower-power Atmel ZigBit transceivers is not sufficient to reach the kite, but those receivers should work well for the cameras attached to the kiteboats.
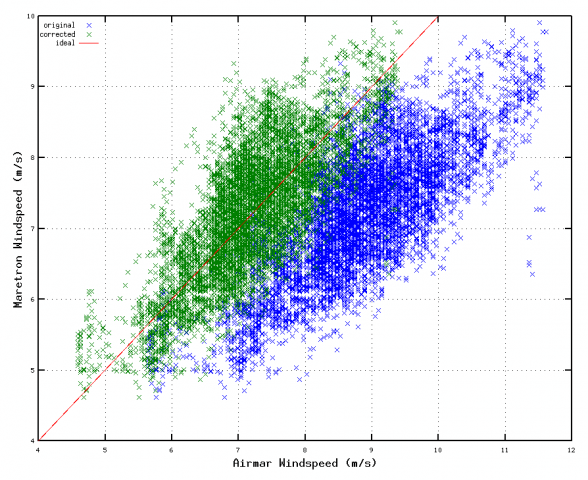
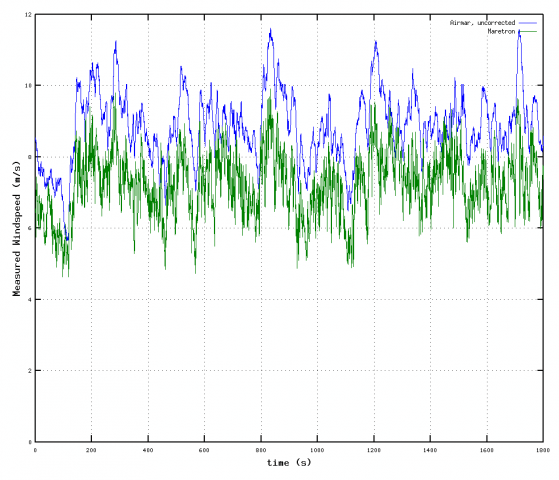
We have been concerned about the accuracy of the wind sensor that we have been using on the Kitefoiler, an Airmar PB200 ultrasonic anemometer. Today we took this sensor to Crown Beach, along with our old standby, a Maretron WS100 (also ultrasonic), and a handheld mechanical anemometer. In summary, the new Airmar sensor was found to report wind speeds that were 23% higher than the other two sensors, which tended to be in good agreement with each other.
We will do further testing to determine if the wind direction relative to the sensor makes a difference, if the sensor is dirty, and if it is broken or operating outside of its specified accuracy range. The graph shows the measured correspondence […more]
Today we took the inflatable lifting kites out to Crown Beach to test them with Armand. Dudu and Armand flew the most recent rokkaku, the G9, in about 15 knot winds and used it to lift a payload of sand. The front spar on the G9 kite is fused to the center strut, while the back spar is free to rotate, as on the G8 kite. There is a tube that links the back spar to the center strut at the cross point, and this allows the entire kite to be inflated via one rear valve. We loaded the kite with sand bags until it began to deform, and then observed the flight pattern with that weight suspended from the […more]
The box that we use for logging boat tests contains a very small linux PC that connects to sensors, records data, and manages data displays. Connecting to it remotely from our phones and laptops to verify that it is operating correctly, to control its operation, and to have a rich real time display of all recorded data is an advantage. To this end, it now functions as a wireless access point, which was not possible on the original hardware using readily-available linux builds. Now that this is working, we can connect via any wireless device and be directed to a web page hosted on the logger.
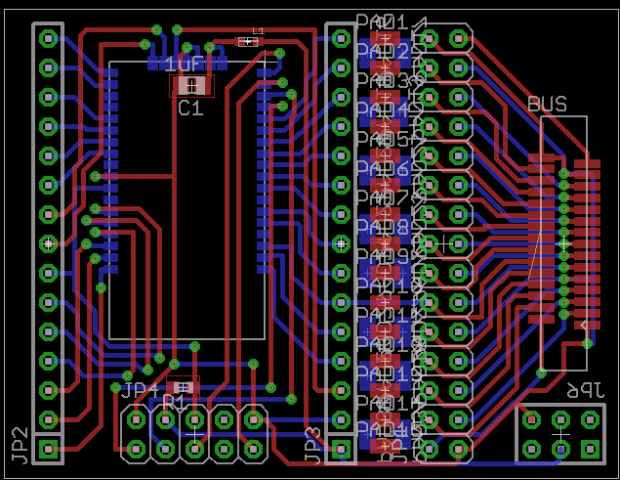
In the background we have been incrementally working on making our GoPro cameras remote-controllable via the ZigBee wireless protocol. The objective is to make a minimally-invasive modification to the camera that allows us to detect which cameras are present, turn those cameras on and off, and to initiate synchronized recording by multiple cameras. We have now accomplished some subset of these goals using each of three different interfaces to the camera: external “hero-bus” connector, internal serial port, and direct wiring to buttons and LEDs. However, each remote interface approach solves only part of the overall problem or introduces new complexity, so testing continues. We are now fabricating a PCB to implement any combination of the approaches in a camera […more]
We can now start and stop the kiteboat logger and verify that it is powered on without opening its protective waterproof case or connecting from a remote device. This has involved running the power switch and LED from the internal PC to a waterproof switch on the outside of the case, a job which was made trickier by the miniaturization of the PC. This operation also opens the way to making an external supervisory circuit that can control the PC power and monitor the battery state on longer excursions.
Other recent improvements to the logger include auto-detection of removable media, software to assist with calibration of the wind sensor while we are on the water, and an independent charging port. […more]