K2 Test – Jan 15 – Tow test
Return to News










Today we performed a series of tests as part of our effort to improve our measurement of the kiteboat’s performance versus true wind angle (TWA), which is the angle between the wind direction and the heading of the boat. This information is ultimately used to produce polar plots, which are a standard method of showing the expected speed of a boat at different TWA. We are approaching this goal from several directions, which include adding a real-time update of the boat TWA to the boat mobile device displays and updating the KAIView software, as well as checking that the wind sensor readings are accurate. Today we towed K2 to calibrate the compass for this purpose. We additionally towed the boat to record the load on the towline at different speeds. Because Paul Larkin from Inducomm is visiting this week, we also used this on-water time to test his latest headsets. Tim Anderson’s friend Charlie joined us as well.
First, we towed very slowly (about 5 knots) in circles to calibrate the kiteboat compass and test its accuracy on flat water. An accurate compass reading is essential to determine the boat heading, which is, in turn, necessary to find the true wind speed and direction. We also used this test to collect wind data at a variety of angles. Initially, we towed K2 from the standard tow line, but it was difficult to communicate between the two boats while maintaining the turn angle and speed. After a couple of circles, we side-tied K2 to the Protector and repeated the test, this time using only one motor to give us more control. We also used Paul’s headsets, rather than the VHF radios, to communicate hands-free. Finally, we let the tow line out again, and tried calibration once more from afar, without success. We did find the headsets to be easier to use and clearer to hear than the VHF radios.
Next, we tested the compass by towing the kiteboat at moderate speed directly behind the powerboat in straight lines to check the correspondence between heading and course.
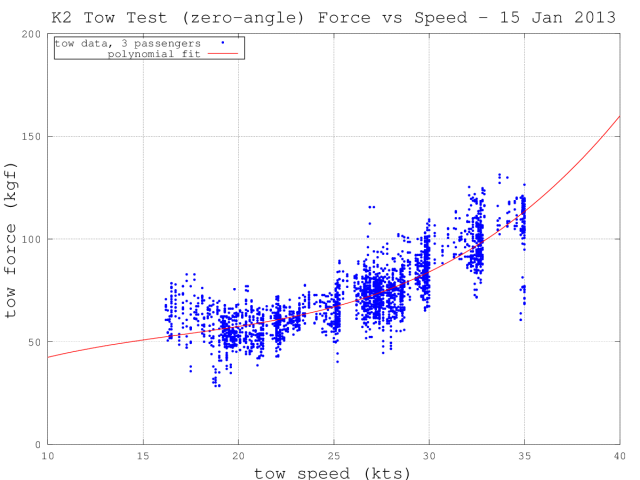
Finally, we towed K2 at a variety of higher speeds to record loads. We started at 18 knots, which was about foiling speed with four crew, and then moved up to 20, 22.5, 25, 27.5, 30, 32.5, and 35 knots. We also towed out to the side at 30 knots. The attached plot shows the towing load vs speed while the kiteboat was being towed directly behind the powerboat. The kite will never tow the boat in this manner, but the data from this test should help us to understand the efficiency of the boat when being pulled from a variety of angles, which will help us to better understand the effect of TWA on boat performance. As expected, the load required to pull the boat at a zero angle is significantly smaller. The difference is about 30 percent, though it depends on the measure of the side angle.
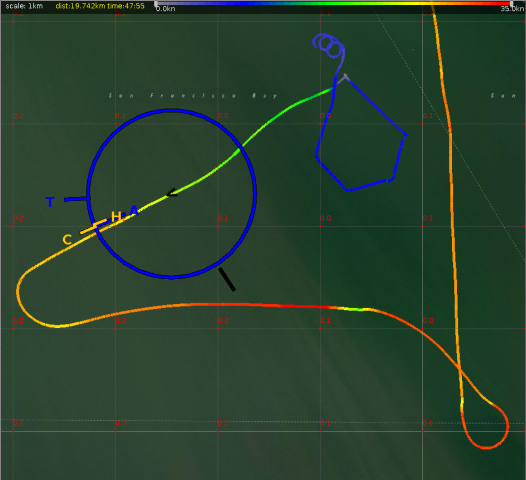
The attached map shows the course of the boat during the three tests: starting at the upper-left, the circles of the compass calibration test, towing the kiteboat directly behind the powerboat, and towing the kiteboat at a variety of speeds.
Return to NewsMore: Electronics and Software Development