Tested new sonar sensor in middling wind. Circled Alcatraz a few times and raced some kitesurfers near Crissy Field. Sailed under the Bay Bridge from the north.
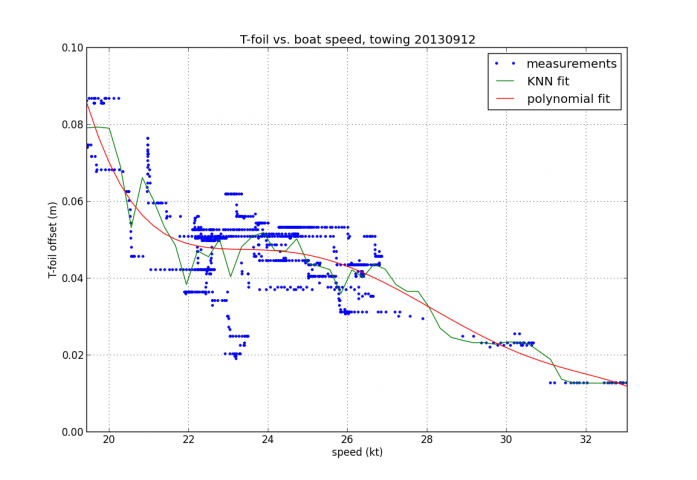
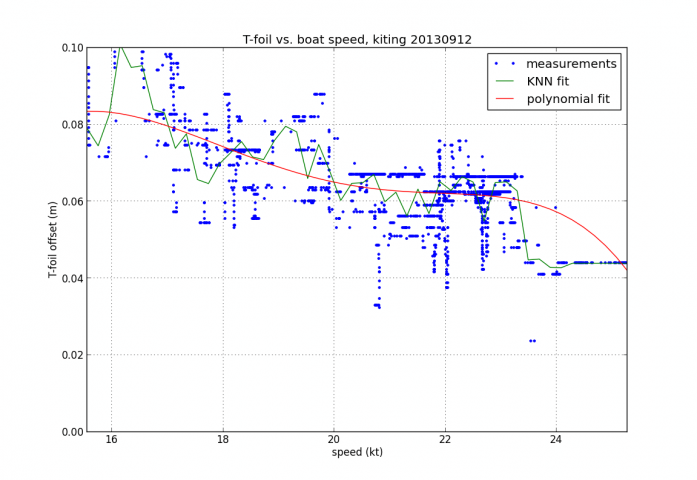
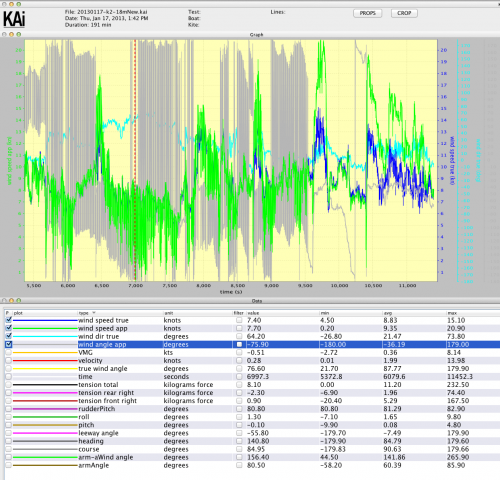
We are now recording the foil actuator positions during tests. Looking at tow and kiting test data from last Thursday, we’ve plotted the relationship between the T-foil setting and the boat speed. The T-foil is controlled by the helmsman and is used in conjunction with the J-foils to control the pitch and ride height of the kiteboat. A relatively simple relationship between the two (as we see here) suggests that we may be able to automate the boat’s pitch stabilization, which would free the crew to concentrate on other tasks.
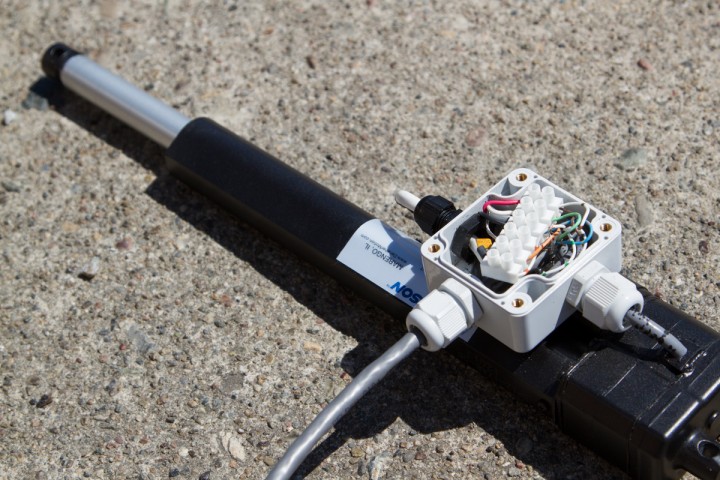
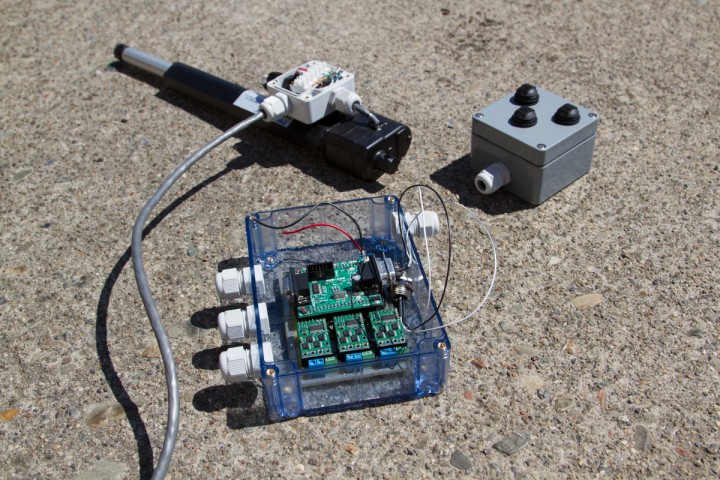
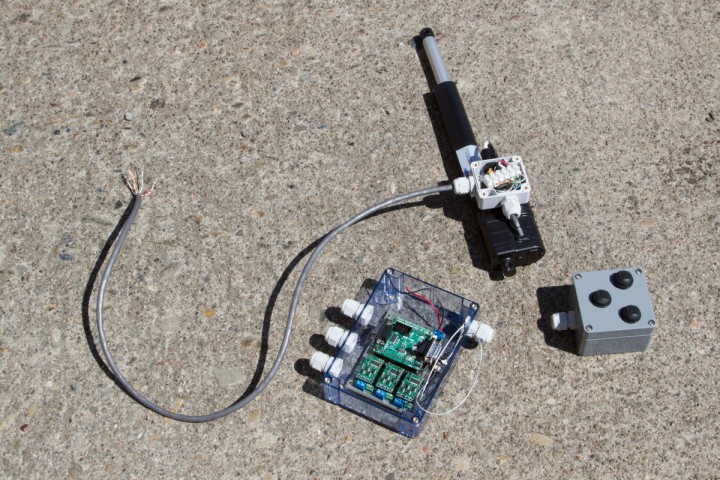
The new electronics for the foil actuators are now boxed and ready for installation. This design is a major advancement, in that we can now measure and record the foil offsets. The controller can also receive commands from the boat network, which opens the door to multiple control inputs, and eventually assisted or fully-autonomous foil control.
We’ve been curious about the distribution of rear line loads, and have recently been collecting load data from both lines. The result is a bit of a surprise. As expected, the “top” rear line has a higher load, but the difference between the top and bottom lines is smaller than anticipated: typically only a few kgf, out of a total rear line load of up to 120 kgf.
The top attached histogram shows the distribution of the total rear line loads. The second histogram shows the difference between the right and left lines when on a starboard tack, and the third histogram shows the same for port tack. This data comprises the entire test on March 5 during which the […more]
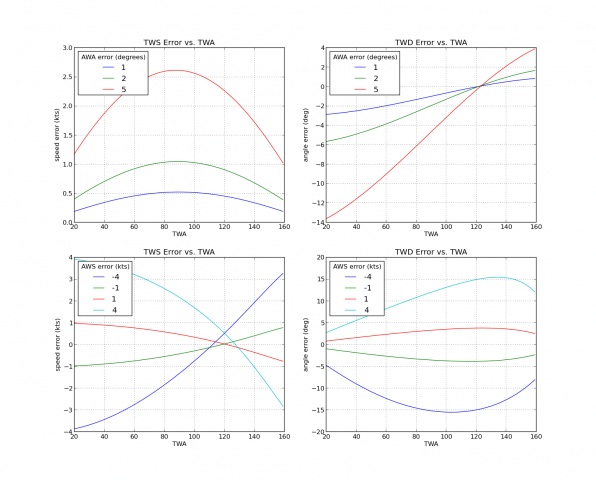
We have dramatically improved our true wind estimates by using better sensors that we have on hand. To decide which sensors to use in the future, we have graphed the effect of each type of sensor error on the true wind estimate. Using these values, we can predict the level of true wind accuracy that we can expect from candidate sensors. One thing that these plots make obvious is that small errors in apparent wind speed (lower-right plot) lead to very large errors in estimated true wind angle. Thus, it makes sense to keep our current GPS compass (with approximately 1 degree error), but to choose a new wind sensor with a very high windspeed accuracy.
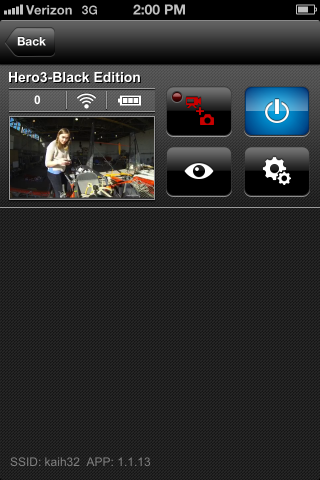
Hooked up 7 GoPros (4 Hero2s with WiFi bacpacs, 3 Hero3s) to one remote. It was very difficult to synch more than that to one remote. I also hooked up a separate GoPro to the phone app. I placed them around the boat. Upon turning on the first remote, it bounced between 6 and 7 cameras ready. When it bounced back to 7, I started recording for all 7. Checked to see all were recording, hit stop and repeated this process three times standing on the tramps, the hull near the nose, and the hull near the rudder. Each time I also entirely powered them on and off via […more]
Today was a beautiful day to test our wind sensor, Paul Larkin’s headsets, and our new GoPro Hero3 cameras. We also performed a brief kite test using the new 18 sqm kite. Paul’s friend John Bond joined us on this test.
First, we compared our primary wind sensor, an ultrasonic model, to a standard cup-and-vane sensor. In the past, we have seen suspicious readings in true wind speed and direction that we attributed to compass miscalibration or poor alignment of the sensor with the boat. In the last test, however, we collected data that showed that any compass or alignment errors that exist are far smaller than the discrepancies that we have seen. This data indicates that the basic apparent […more]