Android + Bluetooth Servo Controller
2/11/11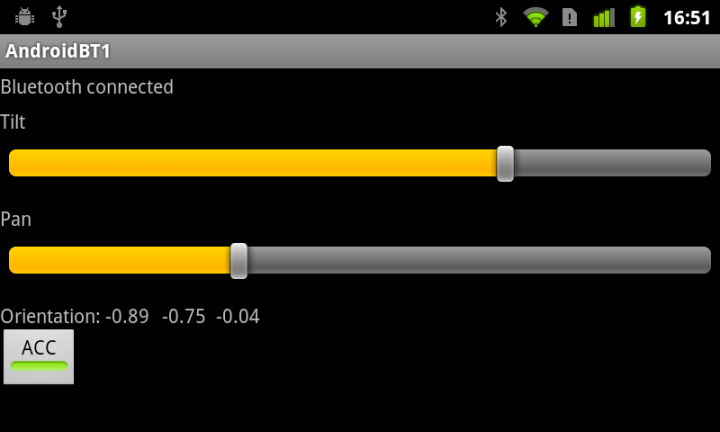
We are exploring the use of our new Nexus S Android phone as a kite-based programmable wireless camera and pan/tilt controller. The first step in making this happen was to make a bluetooth connection to an RC servo controller and control it from the phone.
For extra fun, we mapped the phone’s orientation to its commands so that the pan/tilt unit tracks the phone’s rotations.
Next we will improve the app so that a user interface on a second phone or a remote computer can control the phone remotely over a socket connection. The final step will be to transmit both low-resolution, low-latency “preview” images and full-resolution images from the phone back to its client.