GoPro Remote Control Update
Return to News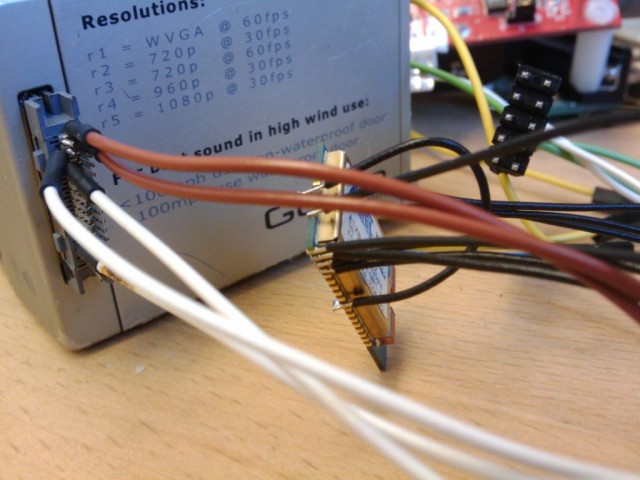
In the background we have been incrementally working on making our GoPro cameras remote-controllable via the ZigBee wireless protocol. The objective is to make a minimally-invasive modification to the camera that allows us to detect which cameras are present, turn those cameras on and off, and to initiate synchronized recording by multiple cameras. We have now accomplished some subset of these goals using each of three different interfaces to the camera: external “hero-bus” connector, internal serial port, and direct wiring to buttons and LEDs.
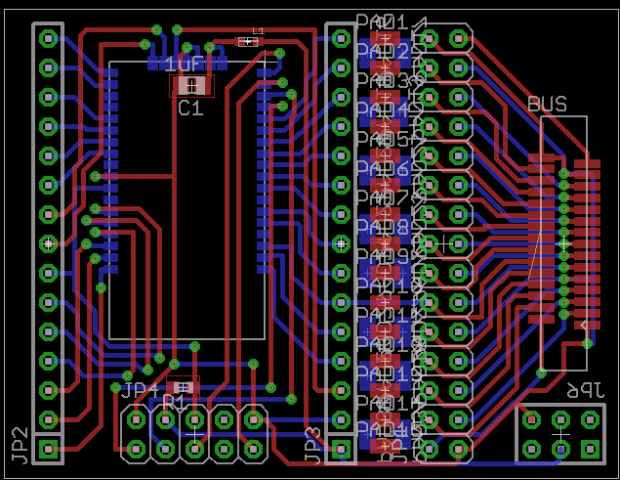
However, each remote interface approach solves only part of the overall problem or introduces new complexity, so testing continues. We are now fabricating a PCB to implement any combination of the approaches in a camera that will still fit in a protective case for actual testing in the water or on a lifting kite. The first image shows a bench test of the zigbee hardware connected via the bus interface. The second image is the PCB layout to allow a more compact and robust packaging of the bus connector and ZigBee hardware.
More: Electronics and Software Development