Jamie has made sweet innovations allowing the Samsung tablet to act as a remote camera control for the Android phone. He also hooked up the phone to a GoPro. At left is a short video demonstration.
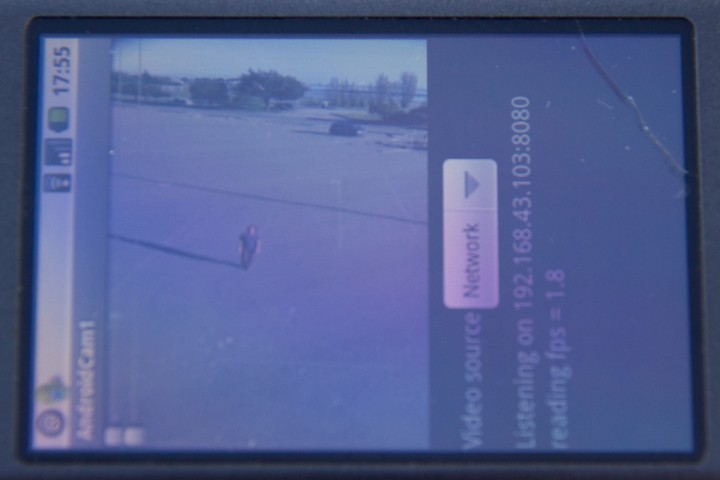
From Jamie: The main idea is to remotely position a camera that may be on a kite (100m in the sky, or in another country) using Android devices. At the kite side is an Android phone which is relaying images from its camera to the ground, and controlling two servomotors that can pan and tilt the phone. On the ground is an Android tablet on which the image stream from the kite can be viewed and the pan and tilt is controlled. Control […more]
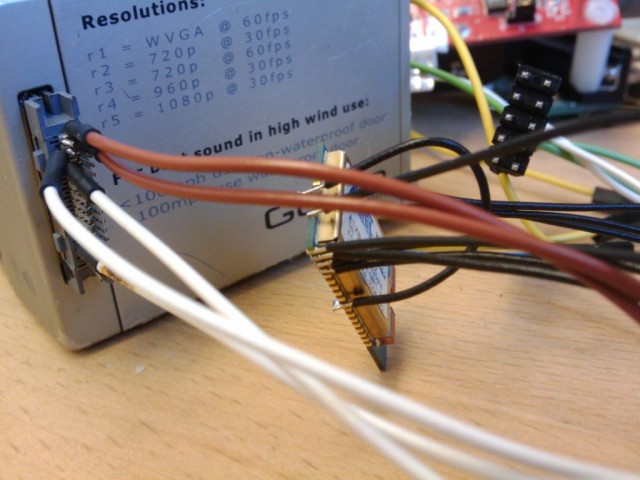
From Jamie: We have made a circuit board that gives us wireless, networked control over GoPro Hero cameras and requires no camera modification. To minimize overall complexity, we took the approach of connecting to the cameras entirely via the exposed bus connector. We will be able to start and stop all cameras at the same time, and keep a record of those times in our logfiles. This makes it possible to record video and images that are synchronized to the other test data and will conserve camera battery life. The wireless range using smaller, lower-power Atmel ZigBit transceivers is not sufficient to reach the kite, but those receivers should work well for the cameras attached to the kiteboats.
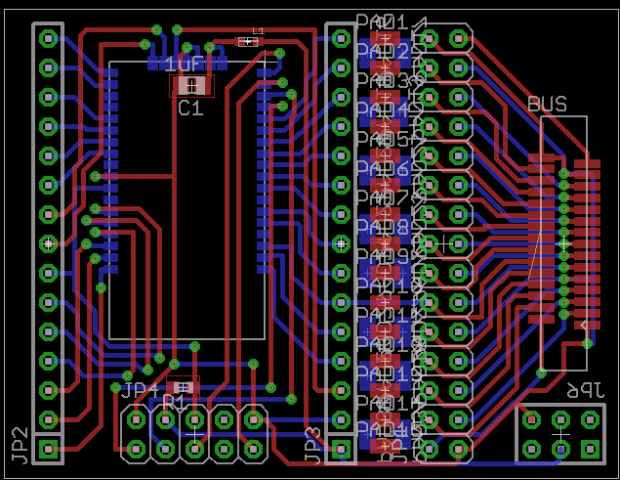
In the background we have been incrementally working on making our GoPro cameras remote-controllable via the ZigBee wireless protocol. The objective is to make a minimally-invasive modification to the camera that allows us to detect which cameras are present, turn those cameras on and off, and to initiate synchronized recording by multiple cameras. We have now accomplished some subset of these goals using each of three different interfaces to the camera: external “hero-bus” connector, internal serial port, and direct wiring to buttons and LEDs. However, each remote interface approach solves only part of the overall problem or introduces new complexity, so testing continues. We are now fabricating a PCB to implement any combination of the approaches in a camera […more]
We took the “good” kite from the last two rokkaku tests out to the parking lot to compare its performance to that of the original carbon spar kite in very low wind.
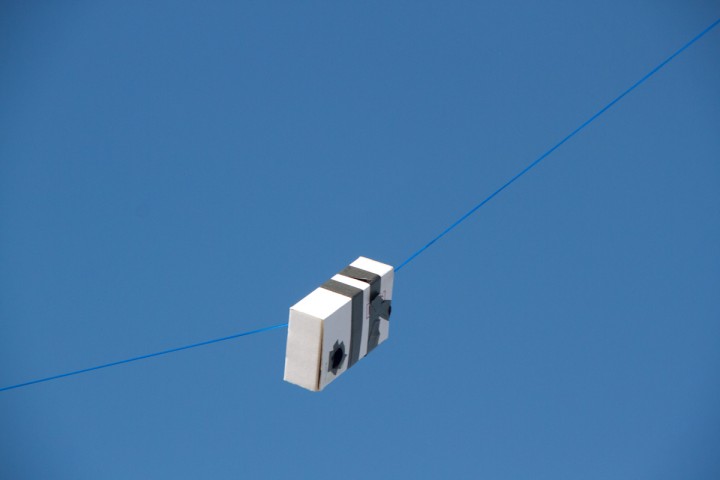
Additionally, Jamie debuted his Android phone camera system by attaching one phone, in a padded cardboard box, to the kite line of the carbon-sparred kite and letting it out about 75m. In his hand he held another Android phone, which displayed the image taken by the lofted camera.
Meanwhile, Don and Dudu discussed weight differences in the two kites and experimented with bridle positions on the inflatable one. We also briefly attached a GoPro to the line of the inflatable kite to get an aerial view of the […more]
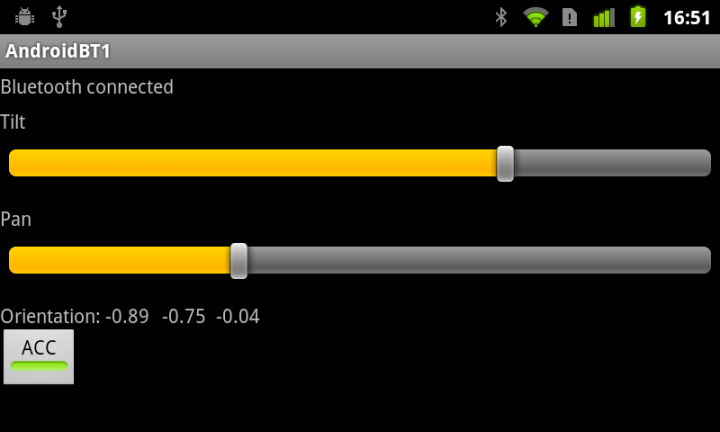
We are exploring the use of our new Nexus S Android phone as a kite-based programmable wireless camera and pan/tilt controller. The first step in making this happen was to make a bluetooth connection to an RC servo controller and control it from the phone. For extra fun, we mapped the phone’s orientation to its commands so that the pan/tilt unit tracks the phone’s rotations.
Next we will improve the app so that a user interface on a second phone or a remote computer can control the phone remotely over a socket connection. The final step will be to transmit both low-resolution, low-latency “preview” images and full-resolution images from the phone back to its client.