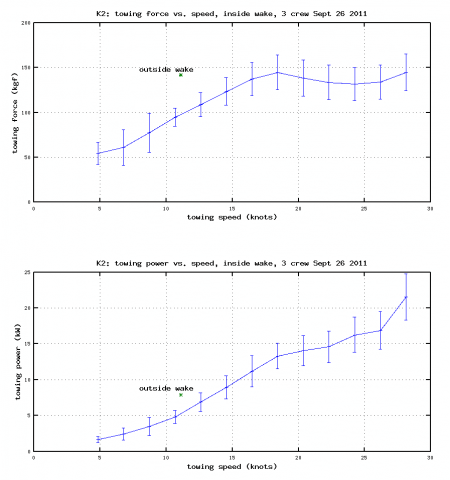
Yesterday we did a careful tow test of K2, pulling it nearly directly behind the Protector (on a long line to minimize interference from the wake). The kiteboat was towed steadily for one minute at each of a range of speeds. The results are shown in the attached graph.
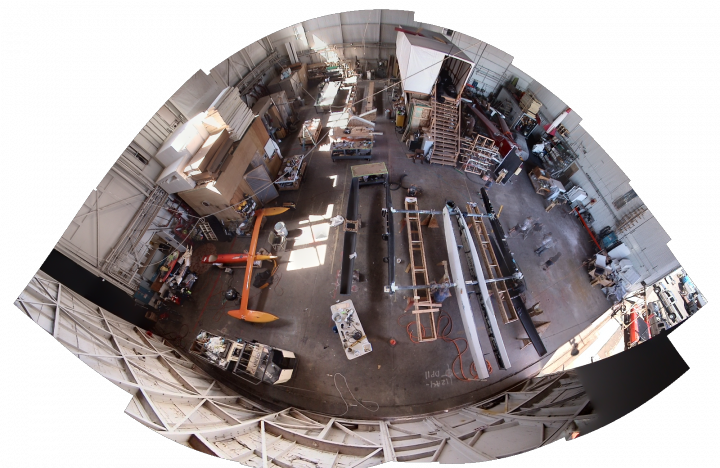
To generate useful ground imagery from cameras mounted on our kites, we will likely record a succession of images that can then be “stitched” together into a panorama. As an early test, we combined 32 low (VGA) resolution images from the pan/tilt webcam in the boat shop to produce the images here.
Creating coverage of the ground from a kite will be a similar process, so this is a promising result. The projection of the 3D world into a 2D image inherently results in apparent distortion, and the distortion becomes more noticeable as the width of the panorama increases. These images demonstrate two different projections into 2D space, which cause different type of distortion in each case. If the kite […more]
We got a pair of goggles with built-in head mounted display (HMD) and GPS/gyro/altimeter in order to see if they would be useful for kiting, if the electronics could be hacked to display other information, and to learn about the design of the display and optics. The goggles, called “Transcend GPS,” were produced by Recon Instruments and Zeal Optics, primarily for the snowboarding market.
In kiteboat tests last week, we found that the display was not very convenient for viewing while flying a kite, since the user must look down to see it. The display optics are large enough to be obtrusive even when removed from the goggles, and would not fit well on a helmet or glasses. The display […more]
Today we remotely controlled our newest inflated Rok lifting kite’s angle of attack (AoA) using a linear actuator in the kite’s bridle. The actuator was controlled from the ground via bluetooth using an Android phone and tablet. The kite flew with comparable stability and lift to a standard-issue Rok that we used as a control, even after some bridle adjustments to accommodate the new actuator.
We found that the 10cm range of the actuator was enough to make a noticeable difference in the kite’s elevation and line tension, but not enough of an adjustment to explore the full useful range of AoA. In the next test we will use a pulley system to double the effective range of the actuator. […more]
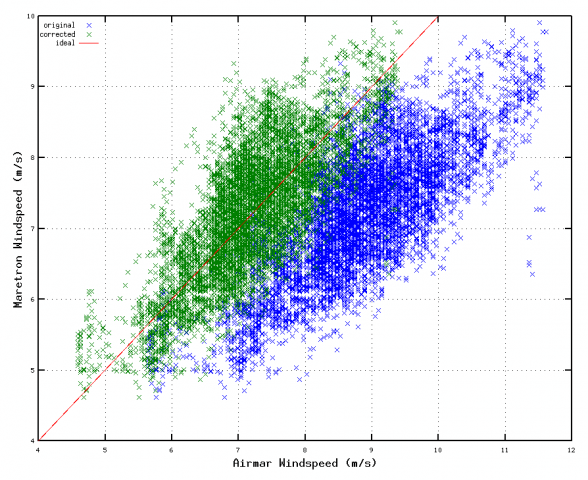
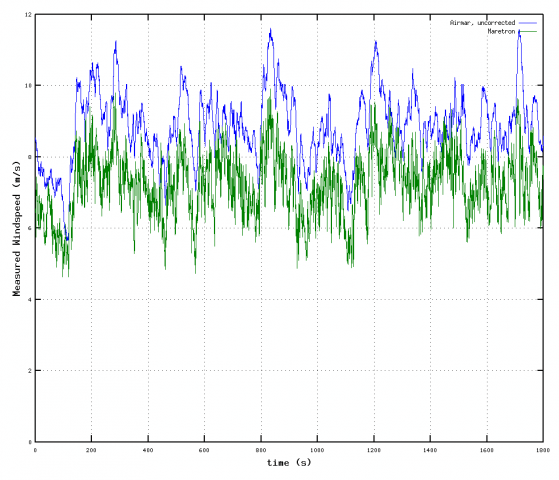
We have been concerned about the accuracy of the wind sensor that we have been using on the Kitefoiler, an Airmar PB200 ultrasonic anemometer. Today we took this sensor to Crown Beach, along with our old standby, a Maretron WS100 (also ultrasonic), and a handheld mechanical anemometer. In summary, the new Airmar sensor was found to report wind speeds that were 23% higher than the other two sensors, which tended to be in good agreement with each other.
We will do further testing to determine if the wind direction relative to the sensor makes a difference, if the sensor is dirty, and if it is broken or operating outside of its specified accuracy range. The graph shows the measured correspondence […more]
The box that we use for logging boat tests contains a very small linux PC that connects to sensors, records data, and manages data displays. Connecting to it remotely from our phones and laptops to verify that it is operating correctly, to control its operation, and to have a rich real time display of all recorded data is an advantage. To this end, it now functions as a wireless access point, which was not possible on the original hardware using readily-available linux builds. Now that this is working, we can connect via any wireless device and be directed to a web page hosted on the logger.
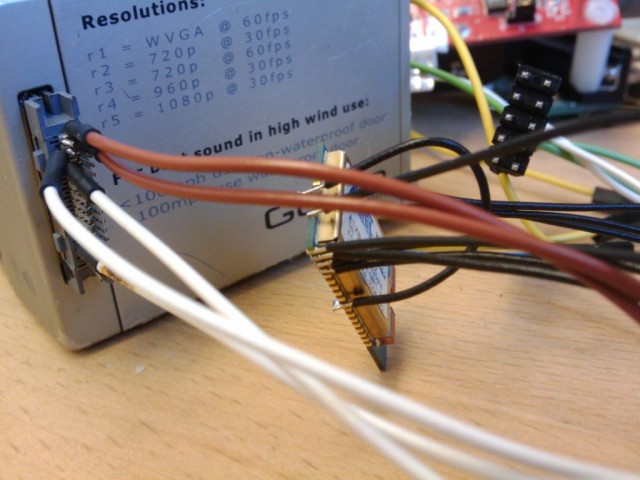
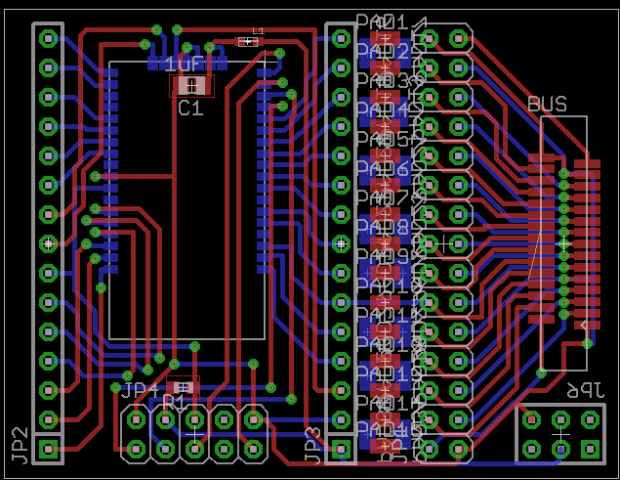
In the background we have been incrementally working on making our GoPro cameras remote-controllable via the ZigBee wireless protocol. The objective is to make a minimally-invasive modification to the camera that allows us to detect which cameras are present, turn those cameras on and off, and to initiate synchronized recording by multiple cameras. We have now accomplished some subset of these goals using each of three different interfaces to the camera: external “hero-bus” connector, internal serial port, and direct wiring to buttons and LEDs. However, each remote interface approach solves only part of the overall problem or introduces new complexity, so testing continues. We are now fabricating a PCB to implement any combination of the approaches in a camera […more]