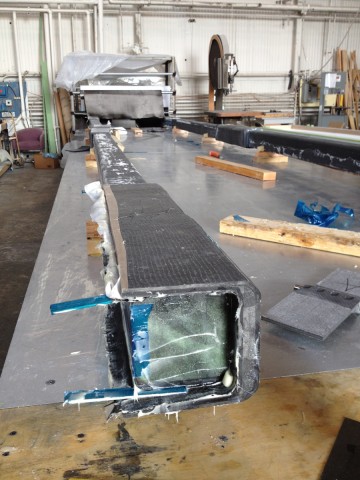
Today Gabe and Dan continued bonding the C-channels to the beams, positioned the hinges, and began bonding those as well. The small carbon rods shown are to mark the center of the hinge holes and to help the guys position the hinges correctly. They used two laser levels positioned at right angles to sight the rods.
Vincent and Damon continue to sand and fill the hulls. Today Damon primed the hulls again. Tomorrow they’ll do some spot filling and prime again. After that, wet-sanding.
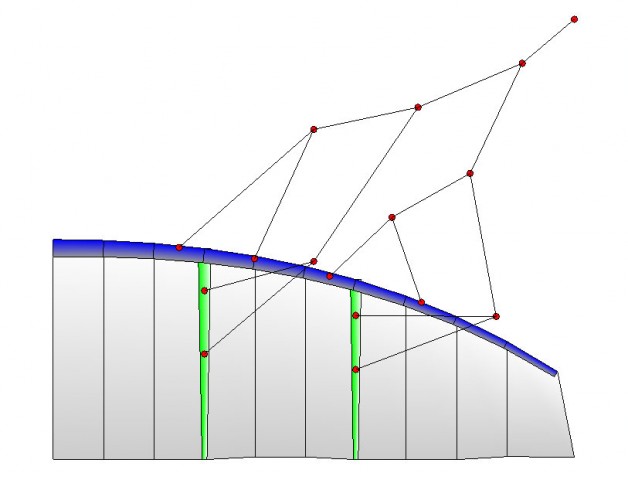
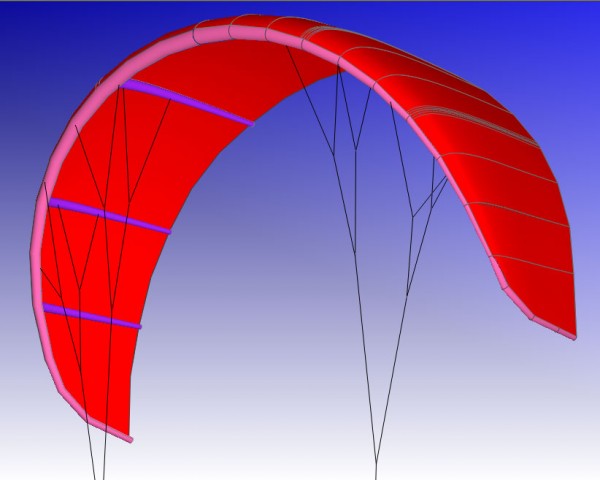
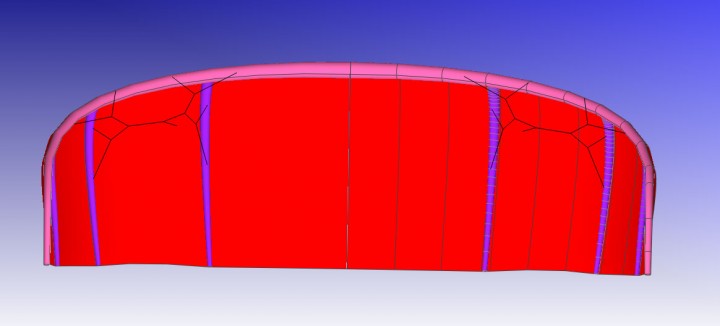
Dudu has been working on the bridle system algorithm for the last 3 weeks, and he finally got it working.
It has the same tools as the current software with many improvements. The algorithm finds the perfect path from the bar through all the bifurcating points along the “tree” to finally end on each kite attachment point. Attached are some screen grabs of one bridle model, and below is the XML file that contains bridle data and the C++ code that is the “engine” of the bridle system.
This was designed to be flexible and allow the use on many types of objects other than conventional kites. Dudu is now working now on the UI (User Interface) to facilitate the flexible design and […more]
The electronic kite inflator, which we sometimes refer to as the kite Inflation Management System (IMS), is now ready for additional field testing. The device is designed to monitor and regulate the pressure of inflated kites. A Zigbee radio link is used to transmit pressure and status to the ground and to receive pressure setpoint commands. The inflator is integrated into the web-based logger interface, which allows us to monitor and control the kite pressure from any smartphone.
The latest version of the inflator uses a smaller and more robust PCB, and has a pressure release valve. Previously, the device could only inflate the kite, and had no way to release air if necessary. With the new release valve, the […more]